近日,西安交通大学机械工程学院陈雪峰教授团队的杨来浩副研究员与孙瑜副教授课题组在柔性连续体机器人设计与建模方面取得新进展,突破了原有关节构型设计思路,提出了一种微型轴承内嵌式的接触辅助连续体机器人柔顺关节构型,揭示了连续体机器人驱动肌腱与肌腱引导孔之间的时空变化机理,提出了连续体机器人的通用综合运动静力学建模方法。研究成果以“一种新型接触辅助连续体机器人:设计、建模与验证”(A novel contact-aided continuum robotic system: design, modeling, and validation)为题在线发表于机器人领域国际顶级期刊《IEEE机器人学会刊》(IEEE Transactions on Robotics)。
连续体机器人是一种新型仿生机器人,得益于其细长构型与柔顺主干,具有传统刚性机器人无法比拟的柔顺性和灵活性等特性,能够适应复杂狭长的非结构化受限空间,在航空航天、工业设施、医疗装置等领域具有广泛的应用前景。现有关节构型以单一的柔性或刚性主干为主,或存在压杆失稳问题、缺乏关节抗扭能力,或囿于柔顺变形特性。针对以上问题,课题组提出内嵌微型轴承的接触辅助连续体机器人柔顺关节构型设计思路。
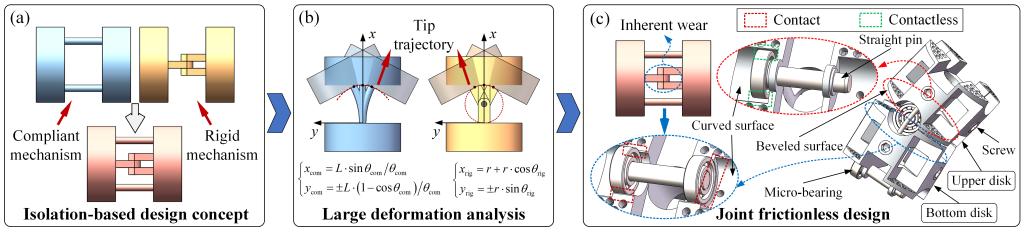
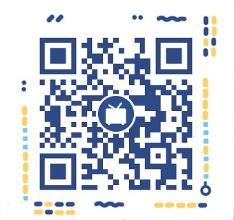
图1接触辅助关节构型的设计原理
接触辅助关节构型综合了柔性关节拟圆弧的变形能力与刚性关节抗扭转的物理特性。通过挠曲分析与被动接触机构设计,限制结构单元的运动行为,以确保柔性关节符合拟圆弧假设,同时从理论上消除扭转变形,而且被动接触机构也为关节的运动提供了物理保护与刚度增强效应。由于微型轴承的引入,本文所提出的关节构型可消除刚性铰链带来的固有摩擦效应,从而避免了关节受压与摩擦带来复合刚化与非线性影响,提高了关节的柔顺变形能力,降低了运动学建模难度。此外,本文通过分析柔性连续体机器人系统的运动-力学耦合因素,揭示了连续体机器人驱动肌腱与肌腱引导孔之间的时空变化机理,提出了连续体机器人的通用综合运动静力学建模框架,构建了融合时变摩擦方向判定准则、关节锁合变刚度准则、柔性结构变形失稳准则的形态学表征模型。
为了验证接触辅助关节构型的抗扭转、变刚度等物理特性,分别对单截段、多截段样机进行了性能测试,利用激光跟踪仪与光纤光栅传感器分别获取扭转信息与位姿信息。试验结果表明,接触辅助关节构型的抗扭刚度是双芯柱关节构型的24倍,并且在关节锁合后,可获得数百倍的刚度增强效果。此外,还开发了连续体机器人系统样机,并对其在复杂受限空间的作业能力进行了验证。
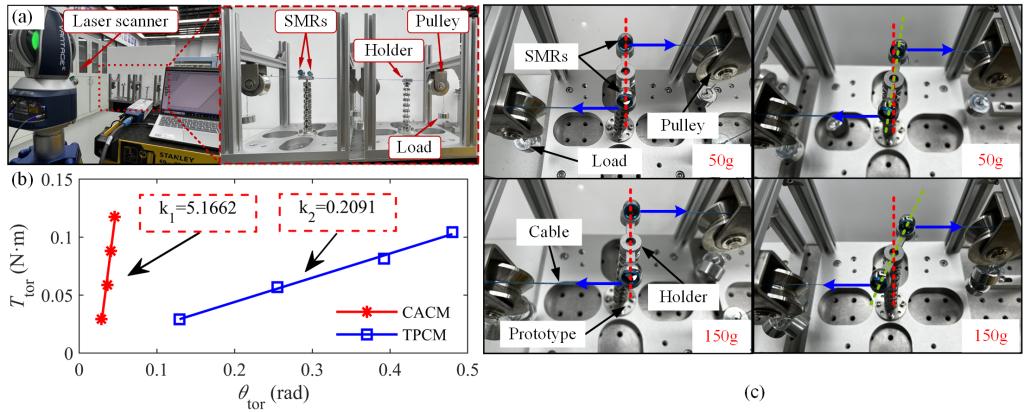
图2关节扭转试验
图3刚度增强试验
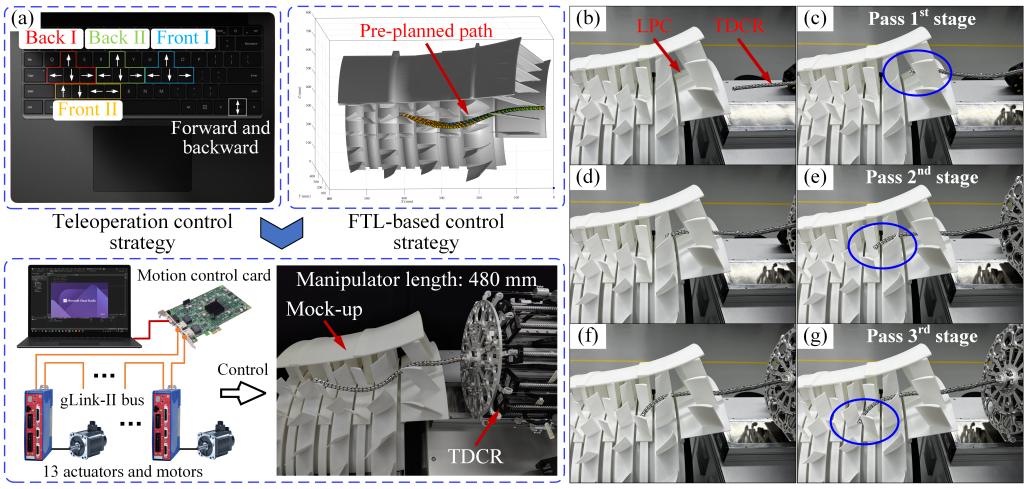
图4深腔作业试验
该论文第一作者为西安交通大学机械学院博士生杨浙帅,西安交通大学机械学院副研究员杨来浩、副教授孙瑜为通讯作者,合作者包括西安交通大学机械学院教授陈雪峰。相关研究得到了国家自然科学基金项目和国家重大基础研究项目的资助。
陈雪峰教授团队主页:https://gr.xjtu.edu.cn/en/web/yanglaihao/home;
杨来浩副研究员主页:https://gr.xjtu.edu.cn/en/web/yanglaihao/home;
孙瑜副教授主页:https://gr.xjtu.edu.cn/en/web/yu.sun
文章链接:https://ieeexplore.ieee.org/document/10531684