对智能软材料柔性基体中高矫顽力永磁颗粒磁畴的精确编程,是推动微型机器人在磁场驱动下实现复杂三维形变与多模态运动的关键。现有编程策略受尺寸效应和工艺限制,存在磁畴编程精度和制备效率低、一致性差等问题,难以满足微型化与高通量制备需求,严重制约了磁控微型机器人的集群控制与广泛应用。
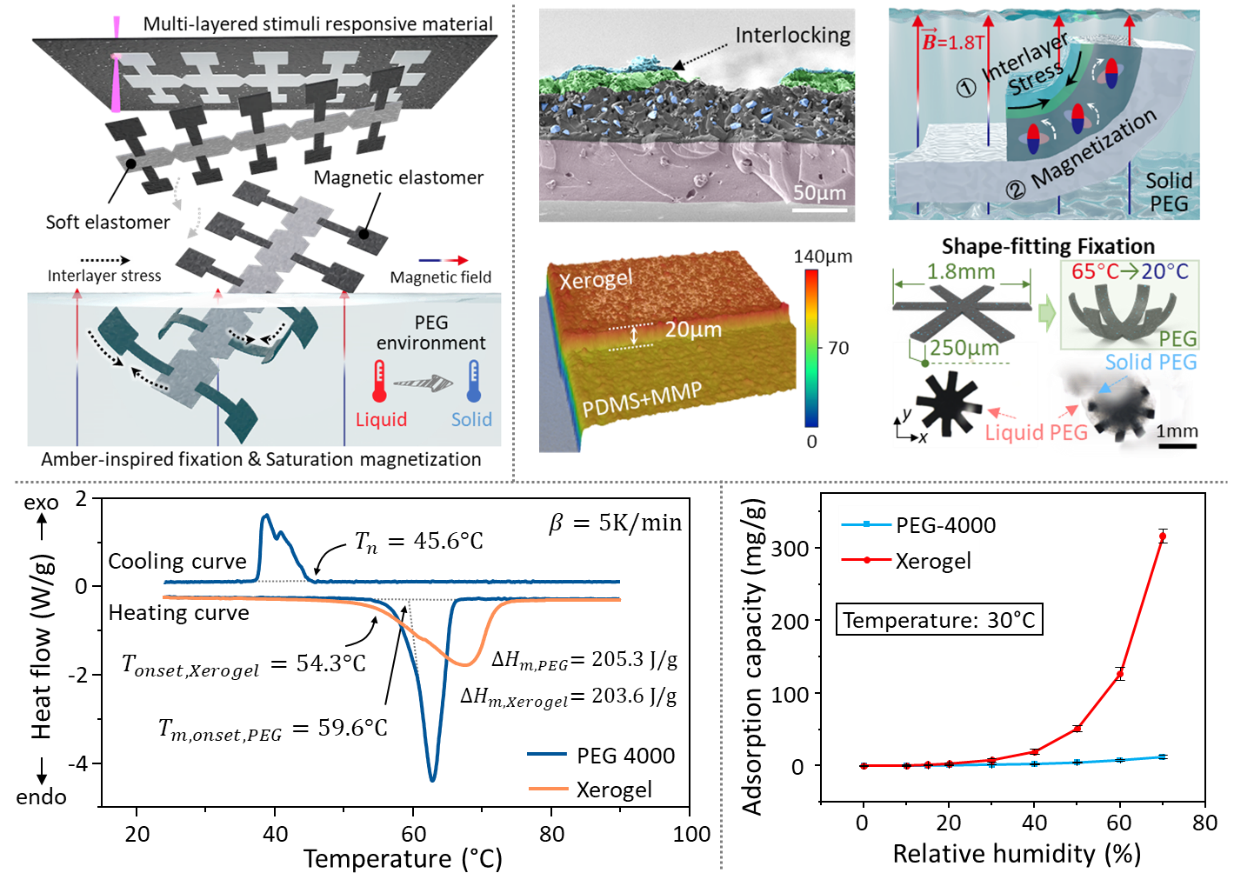
针对这一问题,西安交通大学物理学院先进功能材料与器件物理团队青年教师韩捷等受“琥珀固化”现象的启发,提出了一种无需模板的三维磁畴编程新策略。团队构建了由干凝胶、激光诱导石墨烯(LIG)与磁弹性体组成的三层异质材料体系,利用其三维互联微孔道结构,实现超亲水-超疏水界面的稳定连接。干凝胶层在温/湿场中收缩,诱发层间应力,从而驱动微结构实现精确三维变形。随后采用高精度的飞秒/皮秒激光加工技术,实现逐层构型与应力编程图案化,特征尺寸优于20μm,具备秒级制备效率。最终在饱和磁场下完成磁化,并通过水洗去除PEG和干凝胶层,成功实现了微型磁控软体机器人的一致性、批量化制备。该研究不仅提出了一种全新的磁畴编程范式,同时为物理智能微型机器人在生物医疗、微流控及智能集群等领域的应用奠定了基础。
研究成果以“基于层间应力的微型软体机器人三维磁畴无模板编程”(Template-Free 3D Programmable Magnetization of Soft Millirobots Induced by Interlayer Stress)为题,在国际权威期刊《美国国家科学院院刊》(Proceedings of the National Academy of Sciences,PNAS)上在线发表。西安交通大学物理学院为论文的第一完成单位,韩捷为论文第一作者,合作单位及作者包括德国马普智能系统研究所Metin Sitti教授、香港城市大学董立新教授及郑志强博士后。
青年教师韩捷2024年12月加入物理学院杨志懋教授课题组,研究方向涵盖微纳功能材料、材料物性调控及其在智能柔性系统中的应用。该研究得到国家自然科学基金、陕西基础科学(数学、物理学)研究院、中央高校基本科研业务费、陕西省科协青年托举人才计划等项目的支持。
论文链接:https://www.pnas.org/doi/10.1073/pnas.2426846122