昆虫跳跃机制(如叩头虫)启发了双稳态结构的设计,这种结构能够将缓慢的能量积累转化为快速的跳跃运动。然而,在实现昆虫尺度(体长小于20毫米)的多模式跳跃和连续跳跃时,双稳态跳跃机器人通常面临两方面的问题:首先,双稳态构型能量壁垒与软驱动材料输出性能失配:现存的软驱动材料往往存在能量密度低、响应速度慢以及恢复时间长等问题,导致能量释放和再储存过程难以实现或者不够迅速,限制了机器人的跳跃频率和动态适应性。其次,控制复杂性:现有基于对称构型的双稳态机器人往往需要额外的外部刺激来控制跳跃方向和高度。
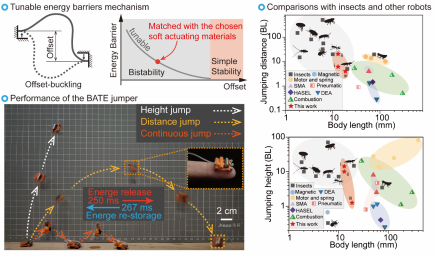
为了克服这一难题,本研究提出了一种新的偏置屈曲双稳态设计,该设计具有反对称平衡状态和可调节的能量壁垒。利用这一设计,开发了一种边界致动可调能量壁垒(BATE)跳跃器,体长小至15毫米。这种跳跃机器人能够在高度跳跃模式(高达12.7倍体长)和距离跳跃模式(高达20倍体长)之间转换,并能够执行敏捷的连续跳跃,稳态间snap-through和snap-back的时间都在300毫秒内。此外,该跳跃机器人还展示了实时状态检测的能力用于检测潜在的故障,如空气泄漏,从而提高了系统的可靠性。
这一具有昆虫级表现的BATE跳跃机器人展示了其在探索、搜救等领域的巨大潜力。由于其小巧灵活的设计,使其在狭小空间和复杂环境中拥有独特的优势。例如,在灾后救援中,BATE跳跃机器人可以进入人类无法到达的狭窄区域,进行搜索和救援工作。
该研究成果以《具有可调能量壁垒的双稳态昆虫级跳跃器用于多模态运动》(Bistable Insect-Scale Jumpers with Tunable Energy Barriers for Multimodal Locomotion)为题在线发表于国际顶级期刊《先进科学》(Advanced Science)。该论文第一作者为西安交通大学机械学院博士生郭庆凯,通讯作者为西安交通大学机械学院陈雪峰教授团队的孙瑜副教授、杨来浩副研究员,西湖大学姜汉卿教授、博士后张壮。论文的第一单位为西安交通大学。相关研究得到了国家自然科学基金项目和国家重大基础研究项目的资助。