实现无人驾驶是人工智能领域面临的重大挑战之一,应对这一挑战需要发展一种新的图灵测试方法,以测试和验证无人车对复杂交通场景的理解和行驶决策的能力,进而推动无人驾驶技术的发展。
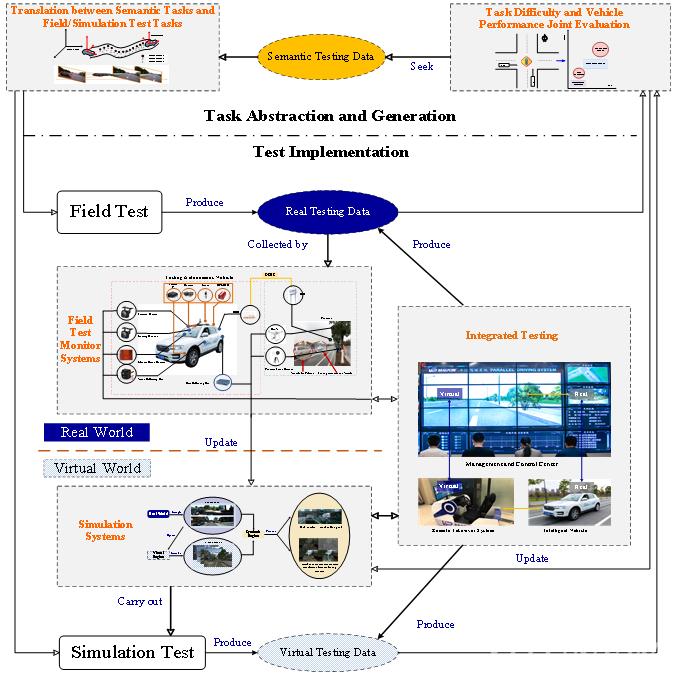
近日,西安交大人工智能与机器人研究所作为共同第一作者和通讯作者单位与清华大学、中科院自动化所等单位合作,在国际知名《科学》杂志的子刊 《科学·机器人学》(Science Robotics)上发表了题为“Parallel Testing of Vehicle Intelligence via Virtual-Real Interaction”的焦点论文(Focus article),论文报道了该联合研究团队在国家自然科学基金委重大研究计划支持下,历经十年实现的一种无人驾驶测试与验证的平行计算框架及其系统。研究团队构建了人在回路智能测试模型,使系统具有在人类专家指导下自动自我升级的认知机制,同时引入对抗式学习模型, 以自动生成新的任务实例, 这些任务实例可以呈现复杂、动态的交通场景, 促使无人驾驶车辆进一步提高适应复杂环境的能力。如何对智能系统进行测试是人工智能领域极其重要的研究方向,只有当测试具有明确的任务定义和有效的方法生成测试的丰富数据时,才能实现安全可靠的AI系统。该焦点论文提出的这种无人驾驶测试与验证的计算框架及其系统基本架构对构建和测试其他人工智能系统也具有重要的启发意义。
《科学·机器人学》发表推动机器人领域的原创、同行评审和以科学为基础的研究文章。该期刊的文章保持与《科学》系列杂志同等的高质量标准。《科学·机器人学》期刊所发表的原创同行评审文章,其知识严谨性与《科学》杂志相同。
论文链接:http://robotics.sciencemag.org/content/4/28/eaaw4106