9月23日至25日,第二届中国研究生机器人创新设计大赛全国总决赛在中国西部科技创新港落下帷幕。西安交通大学获得特等奖1项、一等奖4项、二等奖7项、三等奖9项,获奖数量位居全国高校第一
。
本届大赛由教育部学位管理与研究生教育司、教育部学位与研究生教育发展中心指导,中国学位与研究生教育学会、中国科协青少年科技中心主办,西安交通大学、陕西省发展和改革委员会、陕西省工业和信息化厅、陕西省学位委员会办公室、西安市科技局承办。大赛按照创意作品的成熟度和技术特点分成仿真组、部件组和集成组三类,涉及先进工业机器人、医疗机器人、助老助残服务机器人等机器人技术及其应用的多个领域。来自清华大学、哈尔滨工业大学、浙江大学、华中科技大学、西安交通大学等69所高校和科研院所共154支队伍进入决赛,经过作品现场展示、分组答辩评审、特等奖争夺三轮激烈角逐,大赛评选出3个特等奖,15个一等奖,30个二等奖,102个三等奖。

西安交大从今年3月份就开始准备本次大赛的报名工作,在研究生院、各学院的大力支持下,由机器人大赛竞赛工作室具体负责组织实施,共推荐76件作品参加比赛,经过初赛有21件作品入围最后的全国决赛。鉴于组织工作的突出表现,西安交通大学继第一届大赛之后再次获得“优秀组织奖”。

中国研究生机器人创新设计大赛是教育部学位与研究生教育发展中心和中国科协青少年科技中心联合主办的“中国研究生创新实践系列大赛”主题赛事之一,大赛得到了中国人工智能学会智能机器人专业委员会、中国宇航学会机器人专业委员会、中国自动化学会机器人专业委员会、中国机械工程学会机器人分会等单位的深入参与和大力支持。大赛不仅服务于机器人产业生态体系建设,更有利于引导广大高校学生积极投身“大众创业,万众创新”的时代潮流,提升研究生创新创业意识,培养研究生设计能力,推动机器人科技创新发展,使机器人科技及其产品更好地推动经济发展,造福人民。
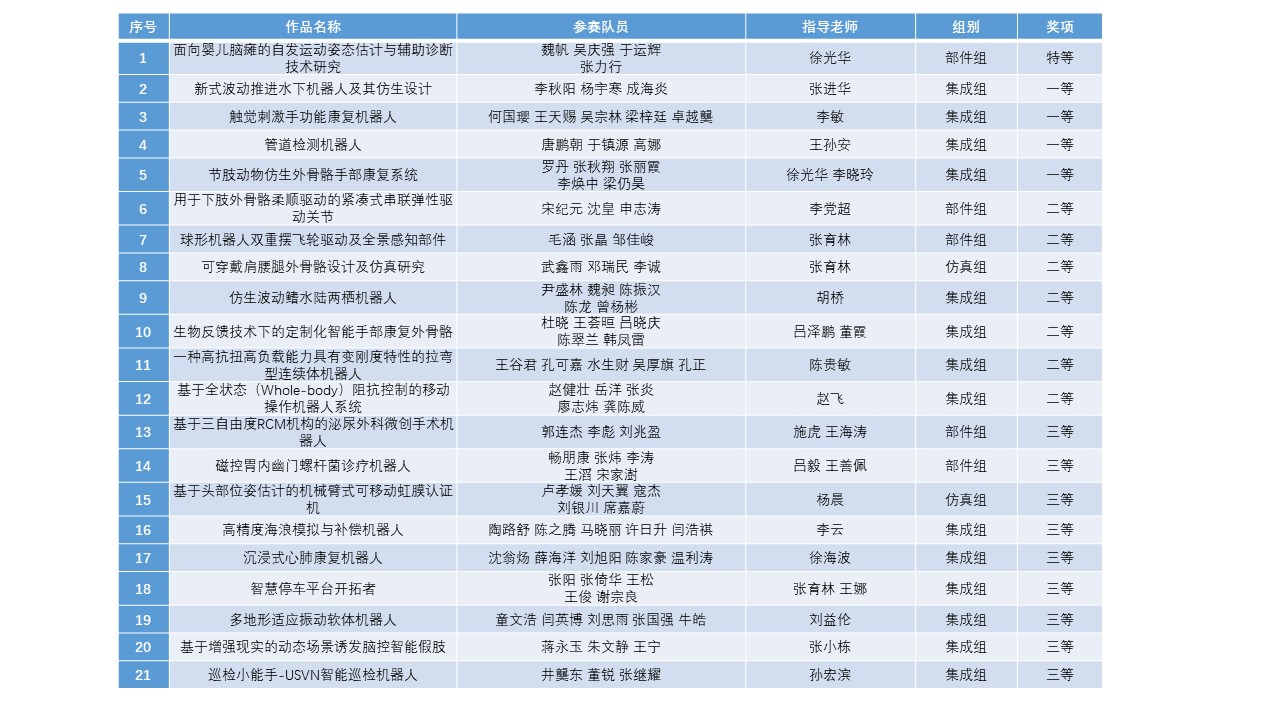
西安交通大学入围全国总决赛作品名单
获奖作品简介
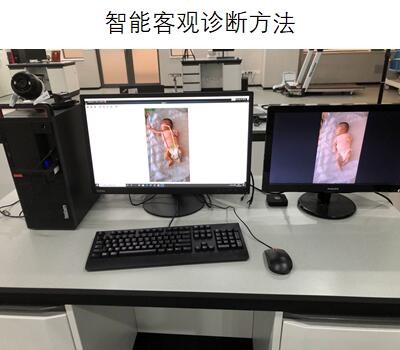
特等奖:面向婴儿脑瘫的自发运动姿态估计与辅助诊断技术研究
参赛队员:魏帆 吴庆强 于运辉 张力行
指导教师:徐光华
作品简介:脑瘫的早期诊断和康复训练对患儿是尤为重要的。人类大脑适应并改变它的结构和功能的能力被称为大脑的可塑性,基于人类自身发育生长的规律,婴儿出生前两年的可塑性是最强的,之后会逐渐减弱。因此,探索科学高效的脑瘫早期诊断方法,对降低脑瘫发病率,提高患儿生活质量有重要意义。本项目针对现有体感测量与运动评估技术的不足,为满足婴儿神经发育检查的临床诊断需求,以实现卧姿状态下精确的婴儿姿态估计和科学的全身运动评估为目标,围绕婴儿脑瘫自发运动的体感信息获取与运动复杂度评估技术展开研究,重点探索基于体感信息的人体运动学模型构建及数字化表征,融合彩色图像和深度信息的人体卧姿三维姿态估计技术,基于复杂网络的婴儿自发运动复杂度特征提取及综合评估方法,最后开发婴儿脑瘫早期筛查系统。以期实现婴儿卧姿运动的体感信息获取和量化评估,帮助医师对婴儿神经发育状态进行早期脑瘫诊断和患儿康复效果的评估,为婴儿神经发育检查的临床应用提供有力支持。

一等奖:新式波动推进水下机器人及其仿生设计
参赛队员:李秋阳 杨宇寒 成海炎
指导教师:张进华
作品简介:江河湖海占据了地球上绝大部分的面积,水域探索是未来发展的必经之道,研发一款能够适应水下复杂环境、安全高效的水下机器人必将促进人类水域探索领域的发展。本项目基于仿生学原理仿生借鉴魟鱼类生物的波动推进能力,设计了波动推进机构,并制作了一款仿魟鱼水下机器人。这种推进模式效率高、机动性强、稳定性好、抗扰动性好且易于移植,既适用于远程航行推进,又具有低速灵活机动的能力。
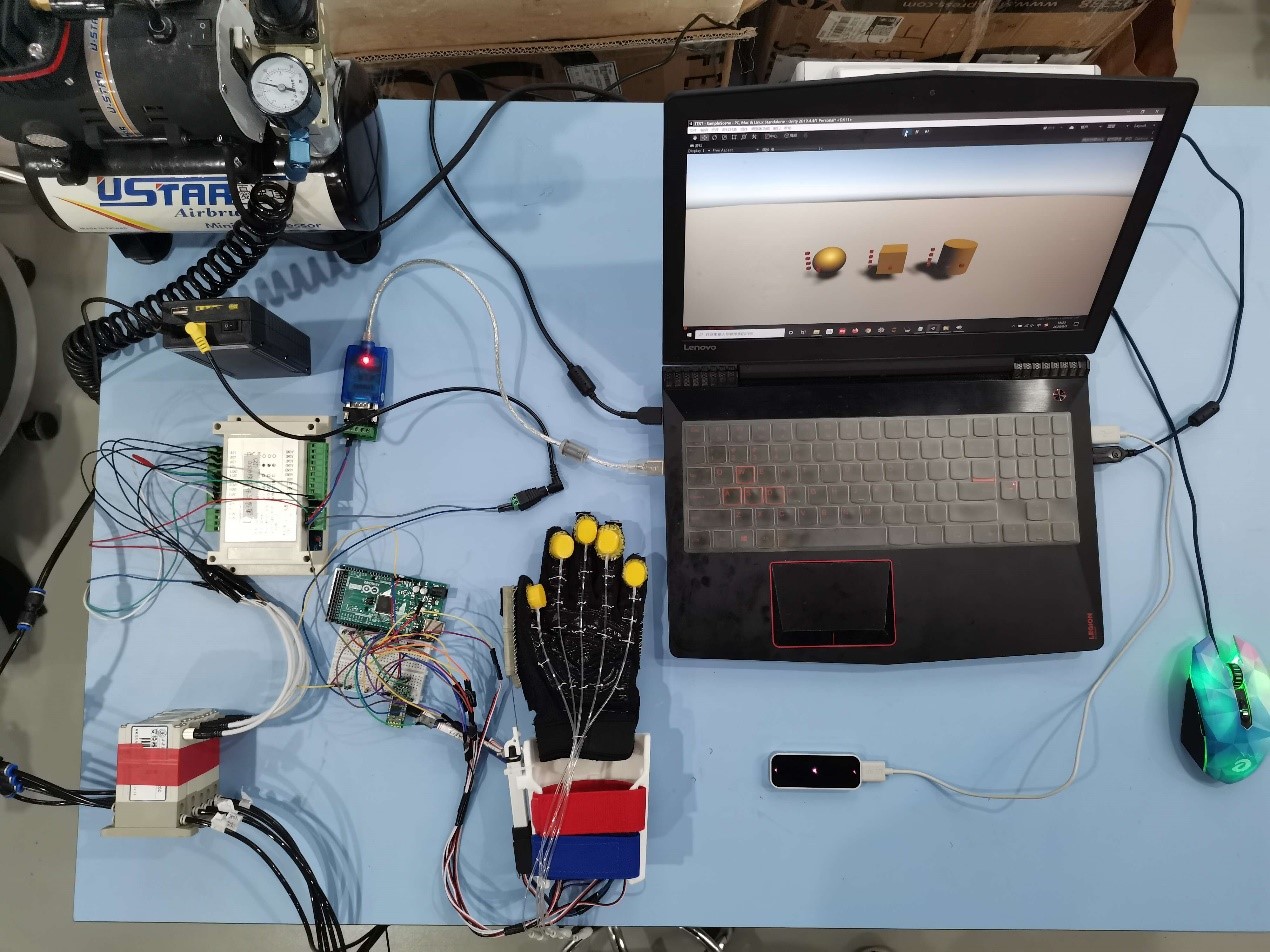
一等奖:触觉刺激手功能康复机器人
参赛队员:何国璎王天赐 吴宗林 梁梓廷 卓越龑
指导教师:李敏
作品简介:本项目拟在现阶段多段连续结构手功能康复机器人技术的研究基础上,结合虚拟现实技术、指尖触觉刺激技术,构建触觉刺激手功能康复机器人系统,在虚拟现实环境中再现康复训练中的力触觉,进一步促进手功能恢复,提高康复质量。从实际应用角度上,一方面可以提高脑卒中患者在康复训练过程中的参与度,调动患者的康复积极性,给患者提供更轻松的康复环境,另一方面,患者可以在家中独立训练,康复医师通过观察患者在虚拟场景中的训练进度,合理地安排康复疗程。
一等奖:管道检测机器人
参赛队员:唐鹏朝 于镇源 高娜
指导教师:王孙安
作品简介:锅炉集箱的清洁度指标是锅炉能否安全有效运行的重要保证,锅炉集箱接管座角焊缝根部未熔合、未焊透、焊瘤缺陷或异物堵塞等,极易造成接管座泄露或爆管事故的发生,造成机组非计划启停,具有重大安全隐患。同时非计划启停也给电厂带来了一定的经济损失。目前集箱清洁度检查主要依靠人工穿线对集箱内部进行内窥镜检查,该方法效率低下、成本高、存在大范围漏检和盲区,同时对接管座角焊缝根部未焊透、未熔合等问题无法进行准确检测,本项目通过分析集箱内部环境,研发一种电站锅炉集箱清洁度智能检测及清理机器人。该机器人自带动力,能够方便地通过手孔放入集箱内部,实现对集箱内部清洁度360°无死角检查及异物清除,且能够将集箱内部图像信息实时自动传输给操作人员,以便操作人员了解集箱内部情况。此外,操作人员可以根据实际需要实时控制运动方向、速度及执行机构的动作。该装置的研发能够高效、可靠发现集箱内部存在的缺陷及异物,并及时彻底清除,有效降低泄露、爆管的风险,极大地节省了检查时间以及人力、物力成本,给机组安全运行提供有利保障,具有可观的社会效益、经济效益和市场前景。

一等奖:节肢动物仿生外骨骼手部康复系统
参赛队员:罗丹 张秋翔 张丽霞 李焕中 梁仍昊
指导教师:徐光华 李晓玲
作品简介:针对人口老龄化带来的市场需求,脑卒中等疾病造成的针对残疾人群体的社会需求,以及现有手部外骨骼机构的缺陷,研制一种可以广泛推广使用的便携式手部功能康复训练外骨骼系统,不仅能够提高人们的工作和生活质量,同时减轻护理人员的工作量,缓解我国护理人员紧缺的状况。本作品设计目标为研制一种融合人体运动特性,具有良好康复效果,同时可大范围推广使用的轻巧型手部穿戴外骨骼康复训练系统。从关节机构的研究出发,结合节肢动物外骨骼仿生研究,解决现有的三类外骨骼关节机构普遍存在的问题,同时结合脑肌电信息融合感知技术及人机交互阻抗技术,最终实现便捷、智能的手部康复外骨骼系统的集成。